ロボコン・ジュニア
メカトロで遊ぶ会では、ジュニア向けの知能ロボットコンテストを1997年から主催しています。
「ロボコンジュニア2019」を
令和元年 6月15日(土)に開催しました!
令和元年6月15日(土)仙台市科学館において「ロボコンジュニア2019」を開催しました。
ご参加いただいた皆様、ご協力いただいた皆様、ありがとうございました。
※ 当日は沢山の参加者に恵まれ何かと不行き届きだった点もあろうかと思います。
この場を借りて、お詫びいたします。なお、諸情勢を勘案し、大会入賞者名の掲載は行っておりません。
「ロボコンジュニア2019」の概要
■日時:令和元年6月15日(土) 会場 : 仙台市科学館
■参加資格:小・中学生 ■参 加 費:無料 (ただし、梵天丸を当日組み立てる場合は、梵天丸キット代金が必要です) ■申込方法: ・大会への参加は、当日受け付けます。(往復はがきでの申込は不要です。) ・ロボット教室(製作・プログラミング教室)へ参加を希望する方は、 往復はがきにて、スリーエム仙台市科学館宛申込が必要です。 5月31日(金)必着。参加希望者が20名を超えた場合は,抽選になります。 (詳細は、こちらを参照下さい)<宛先> 〒981-0903 仙台市青葉区台原森林公園4番1号
スリーエム仙台市科学館 宛
<往信はがき>に以下を記入して下さい。
①イベント名
②郵便番号・住所
③氏名・ふりがな
④電話番号
⑤学年(小学校4年生以上)
■スケジュール(予定です)
タイムテーブル(予定) 今後変更する場合があります。
9:30 受付※ 組み立てワークショップ参加希望者は、10:00までに受付を済ませてください。
10:00 ロボット教室(製作)
12:00 ロボット教室(プログラム教室)
13:00 開会式、競技開始
※審判の判断で、競技の順番(計測)を調整する場合があります。
15:20 競技終了 (計測終了)
16:00 表彰式 (閉会式)
ジャストストップ(初級者競技: 小・中学生競技 )
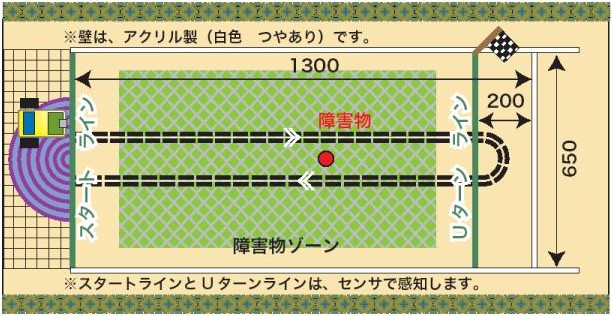
梵天丸をスタートラインからスタートして奥の壁まで直進して壁を感知し、ふたたびスタートラインまで戻って止まる競技です。
途中の障害物を避けて、ゴールライン中央の目標地点にできるだけ近く、規定時間(30秒)ちょうどに止まるほど成績が上位になります。
スタートしてからゴールするまでの時間と規定時間との差と、目標地点と停止位置間の距離を測って合計点数で順位を決めます。
◎スタートのしかた
競技者が直接電源を入れるか、リモコンを使い(梵天丸に手を触れないで)、スタートさせます。
スタート時は、梵天丸のすべての部分がスタートラインの手前にあることとします。
◎時間のはかり方
スタートラインに光センサーを使った計測装置を置いて、審判員がスタートしてからゴールするまでの時間を測ります。時間は、規定時間(30秒)からの差分時間を1/100秒まで計ります。
◎距離のはかり方
ゴールラインの中央部から止まった場所の距離を審判員が畳の面に描いてある同心円を使ってセンチ単位まで測ります。
計測位置は、ゴールライン(スタートライン)の外側(畳のふち側)からロボットの一番頭(前面の最先端)までをピンを垂直に下ろして測ります。
計測にあたっては、ゴールラインの外側に中心点から1センチ刻みに同心円(半円)を引いておき、中心までの距離を測ります。1センチに達しない場合は、切り捨てとします。(例:10.7cmは、10cmとする)
◎Uターンラインの通過
梵天丸は、必ずUターンラインを通過してからUターンしなくてはなりません。Uターンゾーンの通過確認は、光センサーによって行います。
◎順位の決定について
競技回数は、最大3回とします。失敗した場合は、試合時間内であれば何度でも挑戦できますが、3回成功した後の挑戦は、当日の状況(参加人数など)により審判員が判断します。
良い記録(もっとも点数の低いもの)が自分の記録となります。
点数の計算は、次の通りです。
点数 = 時間(秒)+距離(cm)
【例1】
・ゴール時間 32.23秒
・ゴールしてからの距離 10cm の場合
※ 2.23+10=12.23
【例2】
・ゴール時間 28.55秒
・ゴールしてからの距離 5cmの場合
※ 1.45+5=6.45
◎ロボットについて
参加するロボットは、次のものを使ってください。
・梵天丸(無改造、Cギヤ)であること。
◎失格事由(無記録)
競技中に次のような場合には、失格となり記録にはなりません。(再挑戦はできます)
・スタートして、Uターンゾーンに入らないでゴールに向かった。(Uターンゾーンは、梵天丸の一部が入っていればOKとする・・・光センサーによって確認します)
・方向変換をしないで(バックなどで)ゴールに向かった。
・ゴールしなかった。
・バック(後進)の動作をした。
・リモコンなどで外部から操作した。
・競技途中で梵天丸が動かなくなった(1分以上)。
・人が梵天丸に触れたり競技台を動かした。
・畳から落下した。
・ラインセンサを使った。
・行きと帰りで障害物の同じ側を通過した。
◎競技台
・Uターンラインの側面に光センサーを取りつけます。
・梵天丸が走る面(競技台表面)は、畳です。
・壁面は、白アクリル(艶なし)です。
・コース上の一部に壁(障害物)を設置します。(詳細は、当日会場で発表します。)<ジャストストップ競技台>
※ 障害物ゾーン内に障害物を設置します。
◎ 3分間の間に自分のテーマでパフォーマンスするロボットの競技。(梵天丸以外のロボットでの参加も大歓迎です!!)
◎ 競技の前にテーマと工夫した点を発表する。
(飾り付けや振り付けなどが審査の対象になる。)
◎ その他、梵天丸を紙ねんどなどで装飾するコーナーを、準備します。
Copyright 1997-2019 メカトロで遊ぶ会.